
Robot things.....
Making a robot arm is hard.

I am just now sitting to write for today. it is 4:29 PM, and i have spend the last several hours coding, assembling and troubleshooting the robot arm that is starting to come along now. All three motors are installed, and now i am beginning to experience the parts of assembly that i.did not consider in the design phase. I am going to try my hardest to get v1 to do something cool, but v2 is guaranteed to be more capable. Studying the engineering behind assemblability might be interesting. It it not best to think of it as one assembly, but like a tree of subassemblies that all fit together like a puzzle. Its a skill for sure.
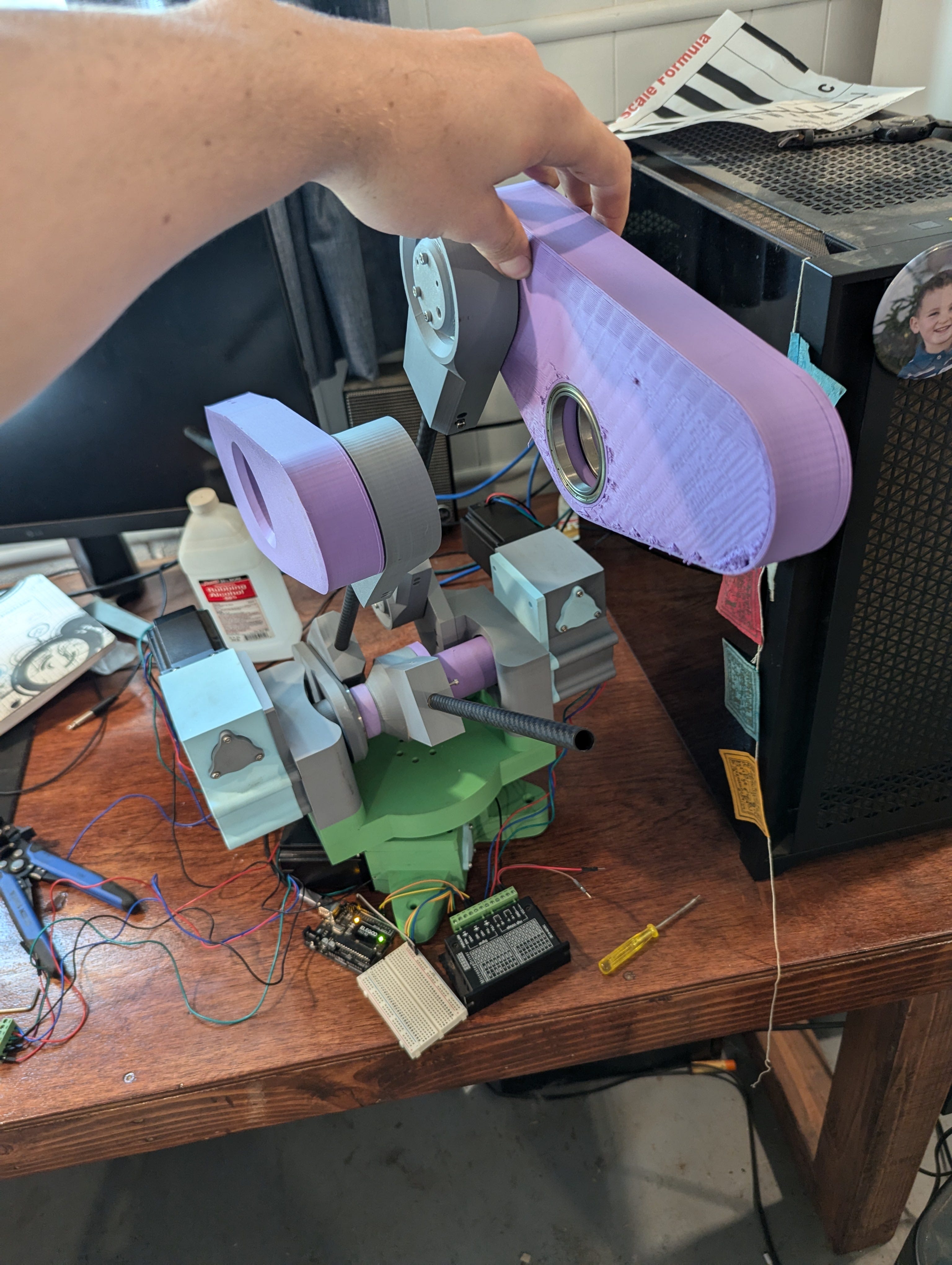
As you can see, this is a large robot. It should have about a meter of reach when it is completed. There are a lot of new ideas that you inevitably encounter when first getting into robotics. The kinematics of your robot are fundamental to making it a useful tool. you need to know how to make a model of the geometry of your arm, be able to accurately move the joints in order to position the tool extremely precisely. This is called inverse kinematics. As you might expect, there is a lot of math surrounding this. Math that i don’t understand. It is amazing how much nuance exists in a project like this. Regardless of the outcome, the learning alone makes it worth it. Pretty soon, i will have the entire robot assembled, and i will be working on the software that controls everything. Still, there are a lot of challenges that need to be solved. I don’t really have any deep philosophical insights for this one, but if you are interested in any particular aspect of the robot, or if i should do more detailed explanation, do let me know in the comments.

